
Successful two-stage flight to over 293,000 feet!
Kip Daugirdas flew the Kate-3 tracking system to over 293,000 feet in a two-stage rocket named MESOS. MESOS was chosen as the name because the rocket was designed to fly into the mesosphere, the atmospheric layer above the stratosphere. The rocket was launched from the Black Rock dry lake bed in northwestern Nevada on October 1, 2022. The Kate-3 system controlled all flight operations including sustainer ignition, drogue and main parachute deployments, GPS tracking and telemetry downlink. The unlimited altitude capability of the Kate-3 GPS was key to being able to verify the maximum altitude with GPS accuracy. It reached 293,488 feet. No other tracking system designed for hobby or amateur rockets has this capability. It was an outstanding flight! It reached Mach 4.18 and was safely recovered.
|
Rocket Name: MESOS
Length: 12.3 feet overall Weight: 87 lbs on the pad Booster motor: O4500 (4.5" diameter, 32,943 Ns) Sustainer motor: M830 (3.0" diameter, 7,743 Ns) Max altitude: 293,488 feet above ground level Max velocity: 4.18 Mach Max acceleration: 15.6 G's Main parachute deployment: 6000 feet Touch down velocity: 21 feet/sec Time to apogee: 2 minutes, 34.3 seconds Total flight time: 14 minutes, 53.2 seconds |

Kip prepping the sustainer for flight.
|
Onboard Flight Video
Kip created this video by combining the Kate voice recording with the GoPro video from the rocket. He then overlaid the rocket orientation animation that is automatically generated by the Multitronix Flight Data Analyzer from the 3-axis gyroscope data. The custom telemetry display dials were created by using the Kate-3 csv flight data file and a software package sold by Telemetry Overlay.
Overall Project Video
This next video gives a feel for the huge effort it takes to successfully pull off a project like this. It also includes more launch video from the ground as well as from onboard the rocket. It is a definite must see!
Flight Trajectory
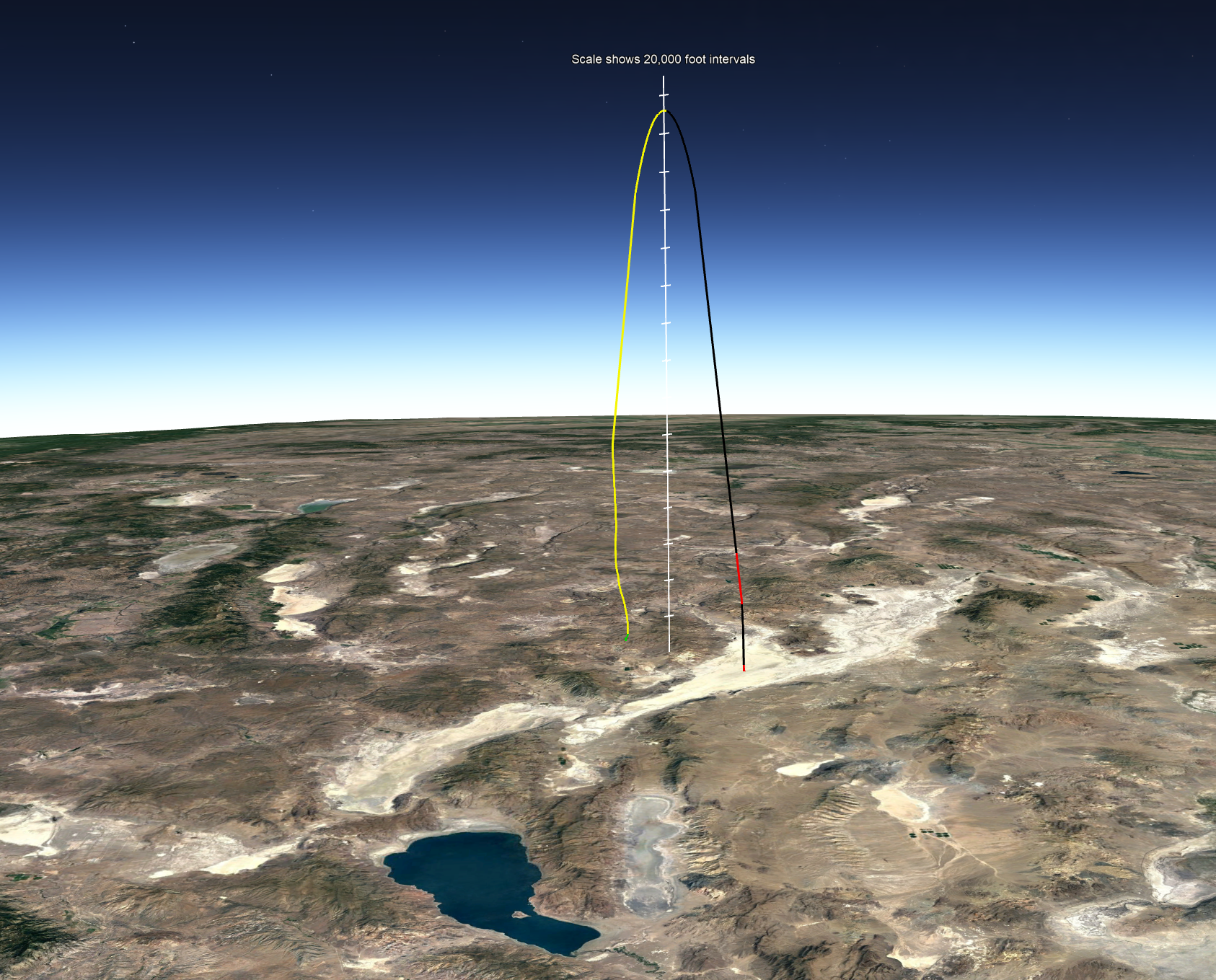
The Multitronix Flight Data Analyzer generates a Google Earth file that shows the flight trajectory. The two sections of the trajectory in red indicate when the booster and sustainer motors were firing. The black sections are when the rocket is coasting during ascent. The yellow section is the descent phase on drogue parachute and the green section is the descent phase on the main parachute. The launch was from the Black Rock playa in Nevada. Pyramid Lake can be seen the foreground. This view is looking north with Oregon and Idaho in the distant background. The vertical scale has tic marks every 20,000 feet. The flight was over 293,000 feet so the trajectory here is over 55 miles high! Notice how short the two motor burns are compared to the distance it coasted to reach apogee! Also notice the very short green section right near touchdown when it deployed the main parachute at 6000 feet
Launch Photos

Kip Daugirdas, Noah Joraanstad and Joe Hepworth rasing MESOS on the launch tower.

|

|


|

|
All photos above are courtesy Matt Dahle and Kip Daugirdas.

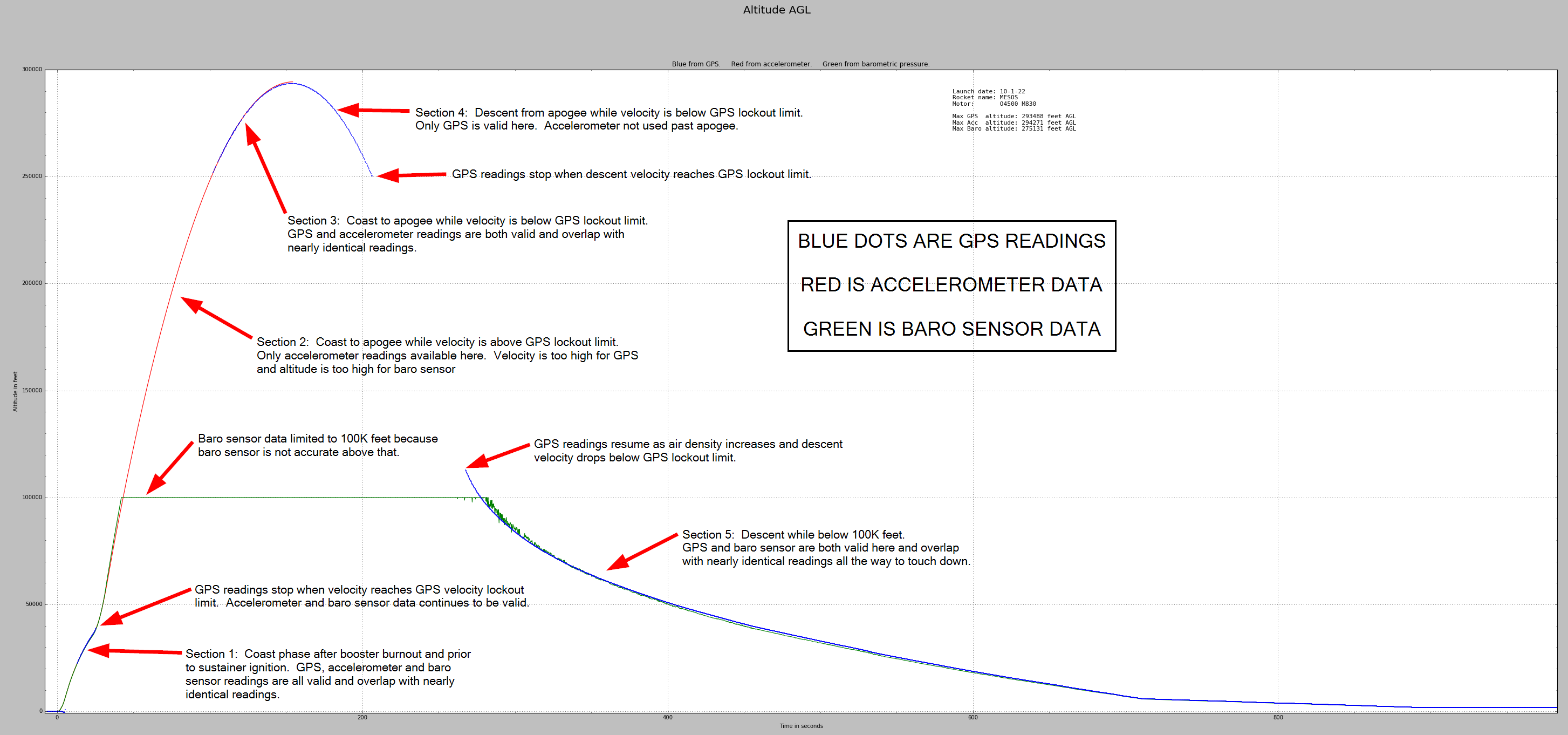
This flight exceeded the maximum velocity limit for the GPS. (1700 feet/sec.) Consequently, the GPS did not report velocity and altitude readings until the velocity dropped back down below the limit. This happened during both ascent and descent. The Kate-3 system has an accelerometer on-board and therefore can measure and report velocities higher than the GPS velocity limit. The accelerometer reported the max velocity to be 4047 feet/sec. This is 2759 miles per hour which is Mach 4.18 at 62,301 feet where it occurred. The Kate-3 system also has a barometric pressure sensor onboard. It provides additional altitude readings when below 100,000 feet.
Annotated Altitude Plot
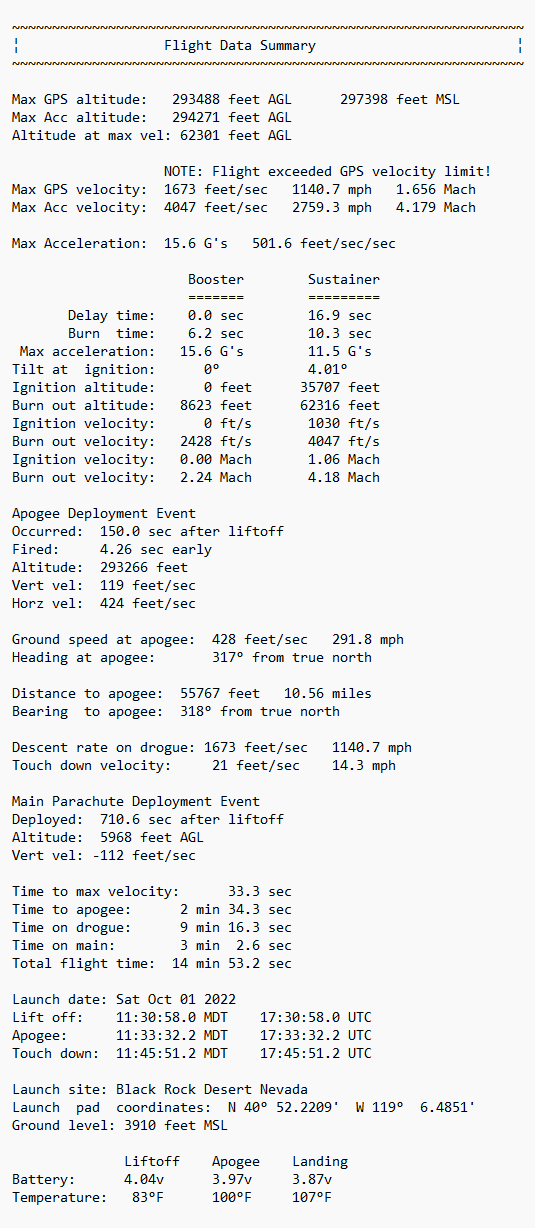
Flight Data Summary
|
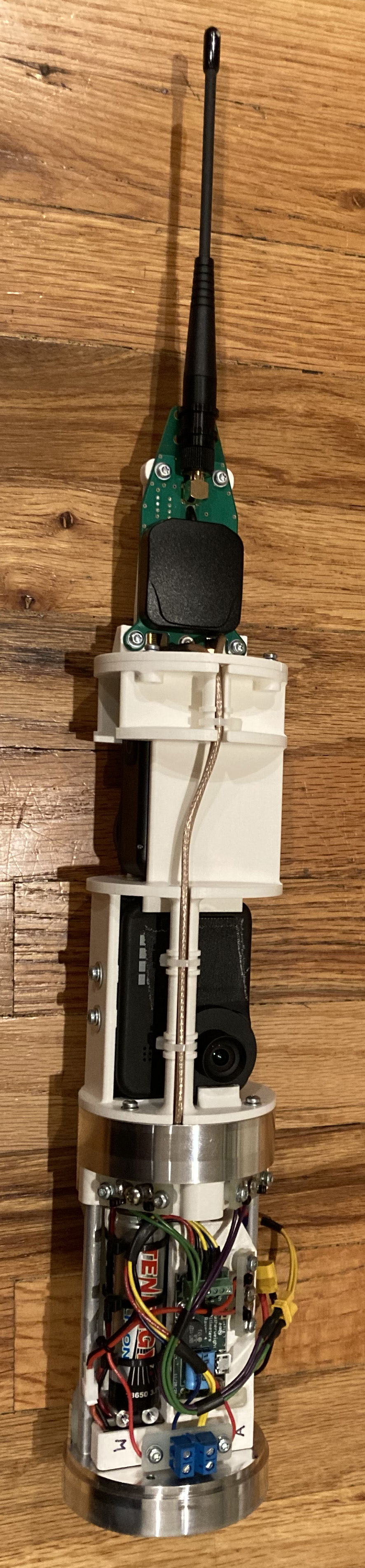
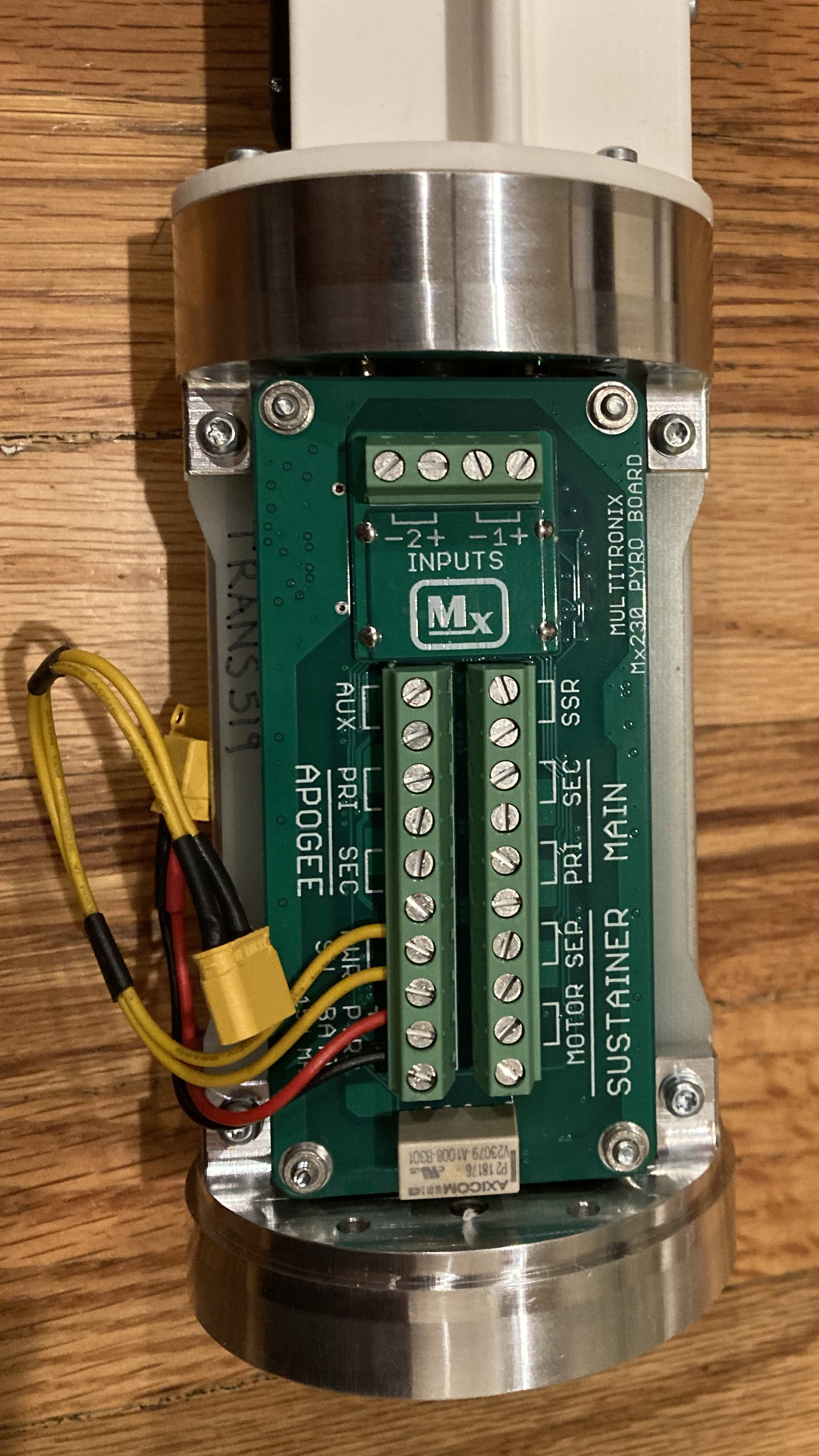
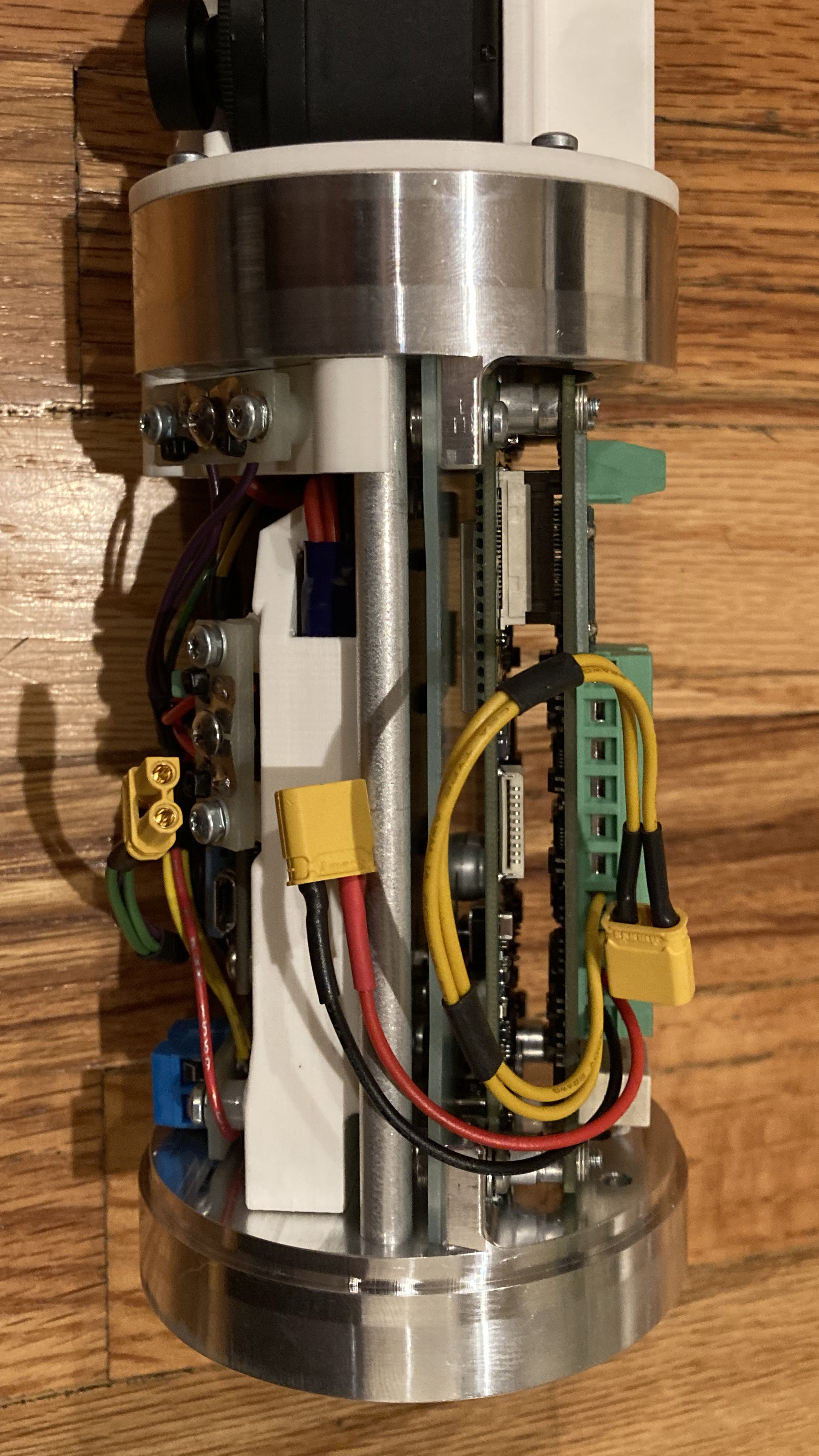
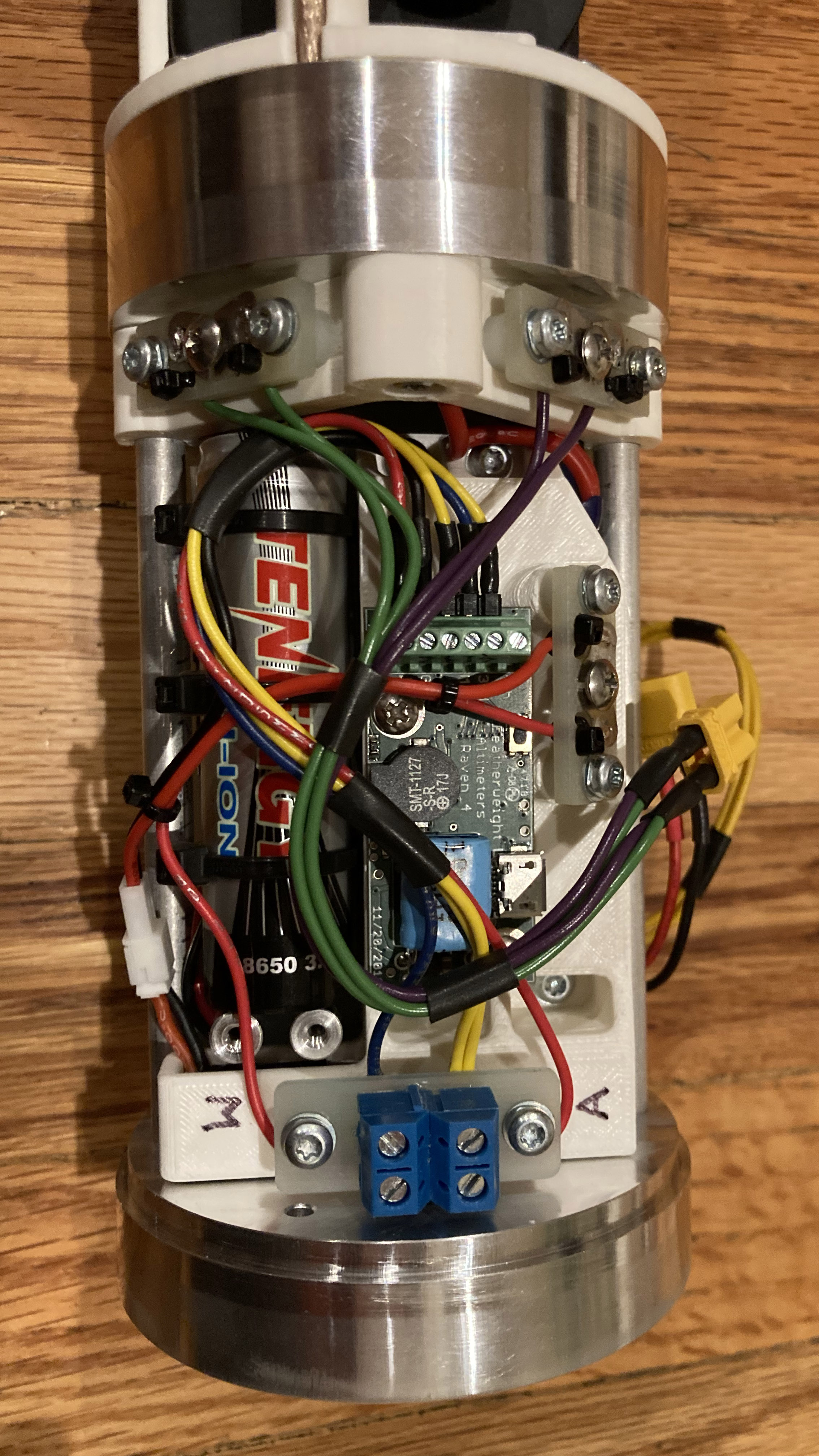
Sustainer Avionics
The sustainer avionics package fits into the nosecone.
The primary system is a Kate-3 Mx230 Option-20 transmitter and pyro board but the standard "outrigger" mounting board was replaced with a custom mounting board designed by Kip and cut out of a sheet of G10 fiberglass. The Kate-3 antenna board was mounted at the very top of the avionics package. It has both the downlink telemetry antenna as well as the GPS satellite signal receiving antenna. The antennas were connected with coax cable to the Kate-3 PC boards mounted near the bottom of the avionics stack. This arrangement maximized the downlink telemetry range by keeping the downlink antenna well away from all the other electronics and metal parts. It also allowed the GPS antenna to have an unobstructed view of the sky. The nosecone is fiberglass so that the telemetry and GPS signals can easily pass though it. There are two GoPro Hero-9 cameras mounted on their sides just below the GPS and downlink antennas. One GoPro is set to record 4K video at 60 frames/sec and the other is set to take still photos. The standard lenses on these GoPro cameras were replaced by a special rectilinear 4.35mm 16MP low distortion M12 lens. It eliminates the distortion that would have otherwise been visible in the corners of the video and still pictures. A company called Back-Bone did the lens modifications. Here is a link. Unfortunately, the GoPro camera recording 4K video overheated and shutdown just after reaching apogee. It was turned on about 30 minutes prior to liftoff when the rocket was raised to the vertical. This overheating is a known problem with the Hero-9 cameras recording at full speed for an extended period of time. The next flight will use the solid state relay (SSR) on the Kate-3 pyro board to turn-on the camera just before liftoff. The backup deployment system was a Featherweight Raven-4 altimeter. It is tucked in tightly along with all the batteries, Kate-3 circuit boards, wires and screw switches in the bottom section of the avionics package. The upper section for mounting the antennas and GoPro cameras is built on a custom 3D printed ABS plastic part. The lower section is also built using some 3D printed ABS parts along with machined aluminum bulkheads and metal rods. All of these avionics photos are provided courtesy Kip Daugirdas. |

|
|
|
|